第 1 章 绪 论
视觉是人类观察世界和认知世界的重要手段,人类通过眼睛来获取视觉信息,通过大脑来加工和理解。笼统说来,视觉不仅指人类对光信号的感受,还包括对光信号的加工提炼的全过程。随着计算机和传感器技术的发展,以计算机实现人脑的功能,以摄像机实现人眼的功能,人类试图实现对视觉信息处理的全过程,于是一门新兴的学科——计算机视觉应运而生。计算机视觉最主要的研究方向之一是三维重建,目标是使计算机具有通过二维图像认知三维环境信息的能力。这种能力将不仅使机器能感知三维环境中物体的几何信息,包括它的形状、位置、姿态、运动等,而且能对它们进行描述、存储、识别与理解[1]。
1.1 计算机视觉技术
1.1.1 计算机视觉的起源
计算机视觉的研究始于20世纪50年代,从统计模式识别开始,当时的工作主要集中在诸如字符识别、航空照片的分析和解释等二维的图像分析和识别上。1965年L.Robert发表了“三维物体的机器感知”[2]一文,开创了以理解三维场景为目标的三维计算机视觉的研究,到70年代,已经出现了一些计算机视觉应用系统[3,4]。
1982年,美国麻省理工学院人工智能实验室的Marr提出了一种视觉计算理论,其核心是从图像恢复物体的三维形状。Marr视觉计算理论强调表示的重要性以及从计算理论层次、表达与算法层次、硬件实现层次上来研究信息的处理和理解,虽然Marr视觉计算理论还需要不断地改进和完善,近年来也有许多试图建立计算机视觉理论框架的工作[5],但是Marr的视觉计算理论使得人们对视觉信息的研究有了明确的内容和较完整的基本体系,多数新理论被看作它的补充和发展。不容置疑的是,该理论对人类视觉和计算机视觉的研究产生了深远的推动作用。
1.1.2 计算机视觉检测的应用
随着计算机视觉技术和传感器技术的发展,一种新的检测技术——计算机视觉检测技术应运而生。视觉检测在检测被测目标时,把目标的图像当作检测和传递信息的手段或载体,其目的是从图像中提取有用的信息。计算机视觉检查具有以下优点:(1)计算机视觉检测是通过计算机对图像信息进行处理,具有一定的智能和柔性,易于实现信息的集成和管理,适于现代集成制造生产方式;(2)可以实现非接触在线检测,由于与被观测的对象无接触,不会造成观测对象与观测设备的损伤,可以广泛地用于长时间恶劣的工作环境;(3)只要选用足够高精度的镜头和图像传感器,配合适当的信号处理算法,计算机视觉检测可以达到较高的检测精度;(4)视觉检测检测对象十分广泛,利用红外线、微波、超声波等成像人类更是可以探索那些无法用感官获取的信息[6,7]。目前,视觉检测已在多个行业得到应用:
1.在工业自动化中的应用
(1)在机械手、机器人、AGV自动送货小车上,借助CCD传感器构建的立体视觉系统获得场景的三维信息,进行目标识别、位置识别、障碍避让[8,9]等。
(2)在生产加工过程中,对生产线上零部件安装[10]、自动焊接等生产流程的监测,在纺织、印刷业进行自动分色、配色,容器容积或杂质检测、机械零件的自动识别分类。
(3)在产品质量自动检测中,表面缺陷的检测大量应用视觉测量。诸如印刷电路板的视觉检查、钢板表面的自动探伤、工件圆度[11]、圆柱度、平行度和垂直度测量、检查铸件的杂质和断口、玻璃产品的裂纹和气泡、螺纹[12]等大量生产的零件多项几何尺寸测量等。视觉技术应用于产品质量检测中,可以保证质量的一致性,避免检测人员由于疲劳、注意力不集中等带来的误判。
2.在农业生产中的应用
视觉检测能够根据鸡蛋、黄瓜、玉米、竹笋、西红柿、辣椒、苹果及土豆等的大小、形状、颜色和表面损伤与缺陷等情况进行品质自动识别和分级[13,14],对农作物种分级[15,16]、叶面积测量[17]和分析等。精准农业的发展也要求应用机器视觉技术,如用农业机器人进行苹果和橙子的采摘;利用机器视觉进行作物秧苗的定位和杂草的识别等等。
3.在航空航天军事中的应用
视觉检测系统获取星球表面影像数据、卫星图像与地形图对准,自动测绘地图,巡航导弹制导、无人驾驶飞机飞行、自动监视军事目标、自动发现跟踪运动目标,自动巡航捕获目标和确定距离等。
4.在医学中的应用
对X射线图像、超声波图像的自动检查,进而自动诊断,医学美容时通过对非病变部位的扫描,能快速测量人体的各部分, 包括牙齿、面部、肢体等的尺寸, 通过在软件里对称并计算填充物,实现整形修复等。
5.在楼宇控制与安全防护方面的应用
为了保证建筑物内外环境安全,应用视觉检测进行闯入监测、门廊的巡视,可疑人员跟踪及报警等。
计算机视觉被看作生物视觉的补充,它的应用随着人类对科学领域的探索不断的拓展而进一步发展,其必将成为其它学科发展有力的技术保证和支持。
1.2 计算机视觉测量
将计算机视觉应用于物体尺寸的测量和定位,从而产生了一种计算机视觉应用领域里的新的概念---视觉测量[18]。视觉测量涉及的主要理论有光学原理、数字图像处理和计算机视觉。这种非接触测量技术几十年来被广泛的研究,并已应用到产品开发、质量检测、设备运行状态的监测和控制、反求工程等众多领域。
1.2.1 计算机视觉测量系统的组成
1.计算机视觉测量系统的硬件
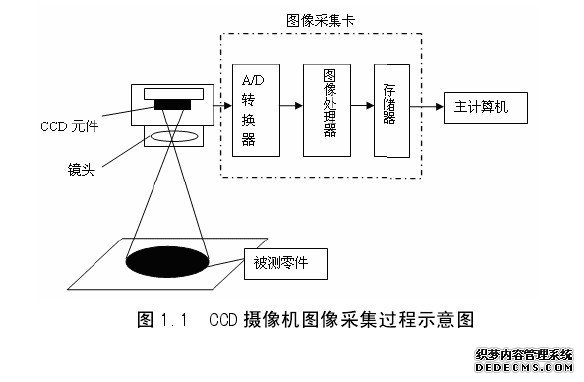
如图 1.1 所示,视觉测量时,光学图像首先通过镜头成像在 CCD 图像传感器上。图像传感器将光信号转换为模拟电信号,然后经 A/D 转换器转换为数字信号,再经过图像处理器处理后存到存储器中。最后,通过数字接口或视频接口输入计算机[19]。从光学图像信息到数字图像信息的过程,会涉及到众多硬件的选择。
(1)光源
光源在计算机视觉测量系统中有较大的作用,光源的好坏会直接影响采集到的图像的效果,对于计算机、CCD传感器、图像采集卡等图像测量的硬件设备而言,使用者对其的要求是速度更快精度更高,而光源更侧重于实际的应用价值,侧重其“光照均匀”[20]。一个好的光源能提高边缘对比度、降低阴影及镜面反射对测量的影响,使用者通过对光源的配置和选择来保证采集图像的质量进而保证测量的质量。
光源有自然光源(被动光源)和人工光源(主动光源)两种,在计算机视觉测量系统中,常常使用人工光源来照明。人工光源按照照射方式的不同,有背向光源、前向光源、结构光光源、频闪光源等供人们选择。应用中常采用的是背向光源和前向光源。背向光源,其应用原理是将被测零件置于摄像机和光源之间,这样摄像机可获得边缘清晰对比度高的图像,另一种是前向光源,即摄像机及光源位于被测零件的同侧,此时图像更有利于反应被测零件表面细节特征。
第2章 图像特..................................................... 27-49
2.1 图像边缘的....................................... 27-37
2.1.1 整像素精度边缘检............................................ 27-29
2.1.2 亚像素边缘检测................................................. 29-35
2.1.3 亚像素边缘检测算法........................................... 35-37
2.2 特征点的亚像素定位...................................... 37-48
2.2.1 整像素精度角点.......................................... 37-44
2.2.2 亚像素角点检............................................... 44-47
2.2.3 亚像素角点检测........................................... 47-48
2.3 本章............................................................ 48-49
第3章 CCD 摄像机成像模........................................... 49-69
3.1 CCD 摄像机成..................................................... 49-52
3.2 摄像机标定........................................................ 52-56
3.2.1 Tsai 摄像机............................................. 52
3.2.2 Weng 摄像机............................................ 52-53
3.2.3 基于平面模板的摄......................................... 53-56
3.3 基于Tsai 的改进摄像机.............................. 56-67
3.3.1 改进法的....................................... 56-58
3.3.2 摄像机标定......................................... 58-61
3.3.3 标定精度....................................... 61-67
3.4 本章............................................. 67-69
第4章 立体视觉与基.................................... 69-87
结论
本文围绕计算机视觉测量结构件尺寸中涉及的图像特征提取、CCD摄像机标定和基本矩阵获取、三维重构等内容进行了理论和实验研究,主要研究工作和结论如下:
1.研究了计算机视觉的边缘及角点检测算法,给出了一种基于拟合边缘求交的角点检测算法。通过给出的边缘检测精度的评价方法,对基于矩、插值和拟合的几类经典亚像素检测算法进行了精度评价,分析可知,由于对噪声不敏感,基于拟合的边缘检测算法的检测精度相对较高;根据高精度测量的实际需要,考虑了边缘检测算法与角点检测算法在实际中兼容的必要性,提出了一种基于拟合边缘的角点检测算法,并获得了亚像素的角点检测精度。
2.在Tsai的标定法的基础上,对主点坐标初值的获取以及优化模型进行了改进,使得改进算法的标定精密度更高,重投影误差更小。通过实验,证明了标定过程中背景光源亮度变化会给最终的测量结果带来影响,分析了上述影响产生的原因,并给出了克服上述现象的方法。
3.根据经典的基本矩阵求解方法的特点,文中提出了以像素坐标点到对应的极线距离为目标函数的优化求解基本矩阵的方法。实验表明,本文方法在一定程度上改善了基本矩阵的求解精度和稳定性。
4.根据凸轮轴自身的几何特征,利用本文给出立体视觉的方法,获得三维空间中的两组边缘点,通过拟合获得两条空间异面直线,利用公垂线法求得空间距离,最终实现了轴间距离的测量。实验证明,本文方法能够达到监测装配凸轮的制造要求。
参考文献
[1] 马颂德,张正友.计算机视觉-计算理论与算法基础[M]. 北京:科学出版社,1998.
[2] L. G. Roberts. Machine Perception of Three-Dimensional Solids.Optical andElectro-Optical Information Processing. 1965, Pages: 159-197
[3] Guzman A. Decomposition of a Visual Scene into Three-Dimensionalbodies[C].in Proceedings of AFIPS Fall Jaint Conference,1968,291-304
[4] Mackworth A K. http://www.1daixie.com/dxjsjlw/ Interpreting pictures of polyhedral scenes[J]. ArtificialIntelligence, 1973, 4(2):121-137.
[5] 吴健康,肖锦玉. 计算机视觉基本理论和方法[M]. 合肥:中国科学技术大学出版社,1993.
[6] 何声霞.基于机器视觉的矿井温度监控系统[J].黑龙江科技信息,2010,27:11.
[7] 翟寿德.智能自动化的模式识别方法[J].北京科技大学学报,1998,20(4):385-389.
[8] 郭振民, 陈善本, 吴林,等. 数字图像处理技术在弧焊机器人视觉伺服系统中的应用[J]. 机器人,2001, 23(7): 698-701.
[9] 孟偲, 王田苗, 丑武胜. 基于手眼视觉的测量与定位方法的研究与实现[J].中国空间科学技术, 2002,12(6): 18 -25.
[10] 岳晓峰,韩立强,于骏一.机器视觉识别技术在活塞装配中的应用[J].农业机械学报,2005,36(2):88-92.